1.動作捕捉技術(shù)
動作捕捉技術(shù)是指利用外部設(shè)備對人體結(jié)構(gòu)的運(yùn)動進(jìn)行數(shù)據(jù)記錄和姿態(tài)還原的技術(shù)����。
動作捕捉系統(tǒng)通常由硬件和軟件兩部分構(gòu)成��。硬件包含剛體標(biāo)記點(diǎn)�、采集設(shè)備、傳輸設(shè)備及數(shù)據(jù)處理設(shè)備等�;軟件包含系統(tǒng)設(shè)置、空間標(biāo)定����、運(yùn)動捕捉、數(shù)據(jù)處理以及3D模型映射模型等功能模塊�����。
2.主流動作捕捉技術(shù)
2.1 光學(xué)動作捕捉技術(shù)
光學(xué)動作捕捉系統(tǒng)基于計(jì)算機(jī)視覺原理����,由多個(gè)高速相機(jī)從不同角度對目標(biāo)特征點(diǎn)的監(jiān)視和跟蹤,同時(shí)結(jié)合骨骼解算的算法來完成動作捕捉�����。理論上對于空間中的任意一個(gè)點(diǎn)���,只要它能同時(shí)被兩臺以上相機(jī)所見����,就可以確定這一時(shí)刻該點(diǎn)在空間中的3D位置。當(dāng)相機(jī)以高幀率連續(xù)拍攝時(shí)�����,從圖像序列中就可以得到該點(diǎn)的運(yùn)動軌跡����。
光學(xué)動捕采集設(shè)備通常是光學(xué)相機(jī)����,分兩種:一種是在物體上不額外添加標(biāo)記,基于二維圖像特征或三維形狀特征提取的關(guān)節(jié)信息作為探測目標(biāo)���,這類系統(tǒng)統(tǒng)稱為無標(biāo)記點(diǎn)式光學(xué)動作捕捉系統(tǒng)�����;另一種是在物體上粘貼標(biāo)記點(diǎn)作為目標(biāo)探測點(diǎn)����,這類系統(tǒng)稱為標(biāo)記點(diǎn)式光學(xué)動作捕捉�。
2.1.1無標(biāo)記點(diǎn)式光學(xué)動作捕捉
主流的無標(biāo)記點(diǎn)式光學(xué)動作捕捉采用三維深度信息進(jìn)行運(yùn)動捕捉,系統(tǒng)基于結(jié)構(gòu)光編碼投射實(shí)時(shí)獲取視場內(nèi)物體的三維深度信息��,根據(jù)三維形貌進(jìn)行人形檢測,提取關(guān)節(jié)概括性的運(yùn)動軌跡描繪��,普遍捕捉解算幀率和精度較低���。
2.1.2標(biāo)記點(diǎn)式光學(xué)動作捕捉
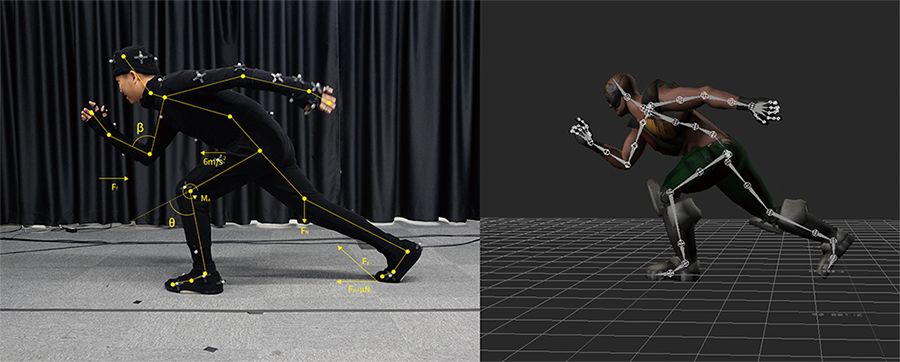
標(biāo)記點(diǎn)式光學(xué)動作捕捉系統(tǒng)由光學(xué)標(biāo)記點(diǎn)�����、動作捕捉相機(jī)�����、傳輸設(shè)備以及數(shù)據(jù)處理工作站組成����,市場常說的光學(xué)動作捕捉系統(tǒng)通常是指這類標(biāo)記點(diǎn)式動作捕捉系統(tǒng)��。在運(yùn)動物體關(guān)鍵部位(如人體的關(guān)節(jié)處等)粘貼Marker點(diǎn)��,多個(gè)動作捕捉相機(jī)從不同角度實(shí)時(shí)探測Marker點(diǎn)��,數(shù)據(jù)實(shí)時(shí)傳輸至數(shù)據(jù)處理工作站�����,根據(jù)三角測量原理精確計(jì)算Marker點(diǎn)的空間坐標(biāo),再從生物運(yùn)動學(xué)原理出發(fā)解算出骨骼的6自由度運(yùn)動數(shù)據(jù)信息�。
根據(jù)標(biāo)記點(diǎn)發(fā)光技術(shù)不同還分為主動式和被動式光學(xué)動作捕捉系統(tǒng):
2.1.2.1主動式光學(xué)動作捕捉
主動式光學(xué)動作捕捉系統(tǒng)的Marker點(diǎn)由主動發(fā)光LED組成,LED粘貼于人體主要關(guān)節(jié)部位���,安裝比較簡便�。采用高亮LED發(fā)光���,LED受脈沖信號控制明暗,以此對LED進(jìn)行時(shí)域編碼識別���,識別效果較好����,有較高的跟蹤準(zhǔn)確率���;LED剛體需進(jìn)行持續(xù)充電�����,并且由于識別原理原因�,在一些需要超高幀率高速運(yùn)動捕捉��、大范圍覆蓋的需求上并不推薦使用,但系統(tǒng)剛體結(jié)構(gòu)不容易損壞�,易用性強(qiáng)。
2.1.2.2被動式光學(xué)動作捕捉
被動式光學(xué)動作捕捉系統(tǒng)����,也稱反射式光學(xué)動作捕捉系統(tǒng),其Marker點(diǎn)通常是一種高亮反射式反光球�����,粘貼于人體各主要關(guān)節(jié)部位�,由動作捕捉相機(jī)上發(fā)出的LED紅外光經(jīng)反光球反射至動捕相機(jī),進(jìn)行Marker的檢測和空間定位���。主要優(yōu)點(diǎn)是技術(shù)成熟穩(wěn)定����,采樣率高��、動作捕捉準(zhǔn)確��,表演和使用靈活快捷�,空間定位精度誤差通常小于亞毫米級別,識別輸入延遲低于2.9~5毫秒以下�����;能在不依靠更多外接設(shè)備的前提下,僅靠增加Marker點(diǎn)數(shù)量而讓系統(tǒng)獨(dú)立捕捉更多人的動作���,Marker點(diǎn)可以很低成本地隨意增加和布置��,對被捕捉物的物體形態(tài)種類和空間范圍上適用度較廣��。
2.2激光動作捕捉技術(shù)
從捕捉原理上���,激光動作捕捉技術(shù)同屬于主動光學(xué)式動作捕捉技術(shù),激光動作捕捉技術(shù)基本原理是在空間內(nèi)安裝多個(gè)可發(fā)射激光裝置�,對空間發(fā)射橫豎兩個(gè)方向掃射的激光���,被定位的物體上放置了多個(gè)激光感應(yīng)接收器��,通過計(jì)算兩束光線到達(dá)定位物體的角度差獲取物體的三維坐標(biāo)和運(yùn)動變化信息�,完成空間內(nèi)目標(biāo)物的定位捕捉���。由于系統(tǒng)獨(dú)立對每個(gè)人體關(guān)節(jié)多個(gè)部位同時(shí)進(jìn)行定位較為困難�����,通常與慣性動捕設(shè)備結(jié)合在一起進(jìn)行全身動捕的使用���。在需要捕捉每個(gè)骨骼關(guān)鍵��、姿態(tài)動作分析的需求上較不推薦使用��。
2.3 其他動作捕捉技術(shù)
此外��,動作捕捉還有機(jī)械式����、聲學(xué)式�����、電磁式等動作捕捉技術(shù)�,但是由于此類技術(shù)成本、可行性���、精度等均無法達(dá)到主流動作捕捉技術(shù)水平�,所以較少量產(chǎn)應(yīng)用��。
3.北京視動世紀(jì)大激光定位系統(tǒng)
STEP持有的激光定位技術(shù)及算法全部為自主研發(fā)���,已申報(bào)各項(xiàng)專利近百項(xiàng)���,其中已授權(quán)國際國內(nèi)發(fā)明專利13項(xiàng)����,實(shí)用新型專利15項(xiàng)�����,軟件著作權(quán)6項(xiàng)��。是全球目前唯一持有全套可用于大空間及異形空間內(nèi)的激光定位及動作捕捉方案的企業(yè)����,具備獨(dú)家核心知識產(chǎn)權(quán),形成了很高的行業(yè)技術(shù)壁壘同時(shí)產(chǎn)品的性價(jià)比極高�����,穩(wěn)定性及易用性好����。